| Главная » Статьи » Мои статьи |
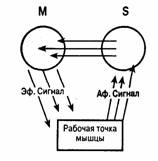
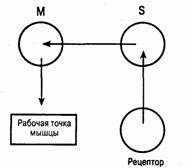
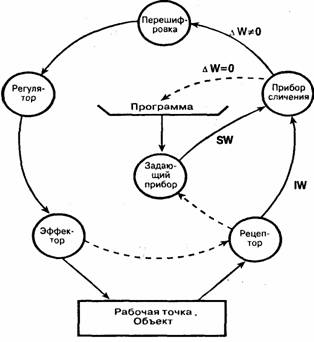
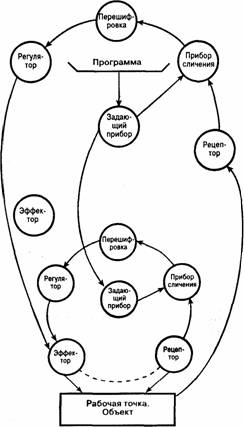
| Механизмы организации движений. Существующее в настоящее время в психологии представление о физиологии движений были сформулировано и экспериментально обосновано выдающимся российским ученым Н. А. Бернштейном. Объектом изучения Бернштейн сделал естественные движения нормального, неповрежденного организма, и, в основном, движения человека. У нас в Айкидо все движения естественны (должны быть), тем самым мы на 100% попадаем под исследования Бернштейна. Для изучения движений ему пришлось разработать специальный метод их регистрации. До работ Бернштейна в физиологии бытовало мнение, что двигательный акт организуется следующим образом: на этапе обучения движению в двигательных центрах формируется и фиксируется его программа; затем в результате действия какого-то стимула она возбуждается, в мышцы идут моторные командные импульсы, и движение реализуется. Таким образом, в самом общем виде механизм движения описывался схемой рефлекторной дуги: стимул - процесс его центральной переработки (возбуждение программ) - двигательная реакция. Первый вывод, к которому пришел Бернштейн, состоял в том, что на основе такого механизма не может осуществляться хоть сколько-нибудь сложное движение. Если простое движение, например коленный рефлекс (удар невропатологом по коленки молоточком), может произойти в результате прямого проведения моторных команд от центра к периферии, то сложные двигательные акты, которые призваны решать определенные задачи, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов, которые вносят отклонения в запланированный ход выполнения движений. В нашем случае такие дополнительные факторы расположение и действия Уке. В результате конечная цель может быть достигнута только в том случае, если в ход выполнения движения будут постоянно вноситься поправки. То есть Сите должен постоянно реагировать, чувствовать своего Уке, то, что Сиханы говорят о слиянии с Уке в одно движение. А для этого центральная нервная система должна иметь информацию о ходе выполнения движения. Таким образом, Бернштейн предложил совершенно новый принцип управления движениями, который был назван принципом сенсорных коррекций. Факторы оказывающие влияние на ход выполнения движения: Во-первых, при выполнении движения в большей или меньшей степени возникает явление реактивных сил. Например, если вы сильно взмахнете рукой, то в других частях тела разовьются реактивные силы, которые изменят их положение и тонус. Во-вторых, при движении возникает явление инерции. Если вы резко поднимете руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции, т. е. возникают определенные инерционные силы. Причем явление инерции присутствует в любом движении. В-третьих, существуют определенные внешние силы, которые оказывают влияние на ход выполнения движения. Например, если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. Причем это сопротивление чаще всего оказывается непредсказуемым. В Айкидо эти внешние силы прежде всего силы своего партнера. В-четвертых, существует еще один фактор, который не всегда учитывается при начале выполнения движений, — это исходное состояние мышц. Состояние мышцы меняется при выполнении движения вместе с изменением ее длины, а также в результате утомления и других причин. Поэтому один и тот же моторный импульс, достигнув мышцы, может дать совершенно иной результат. Я думаю все сталкивались с ситуацией когда рука или нога не выполняет команду, например, затекли ноги во время долгого сидение в сейдза, и при вставании они не слушаются, или есть забавное упражнение делается 30-40-50 и т.д. (в зависимости от подготовки) приседаний с выпрыгиванием в верх, а потом человек бежит, … и это выглядит скорее ни как бег, а как «забавный походняк». Таким образом, существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Следовательно, центральной нервной системе необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Например, когда мы двигаемся, информация о положении отдельных частей тела поступает от различных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным. У пьяных это информация плохо согласована, тем самым движения у них затруднено. Таким образом, можно сделать вывод о том, что существует определенная схема осуществления механизмов движения. Она была названа Бернштейном схемой рефлекторного кольца. Эта схема основана на принципе сенсорных коррекций и является его дальнейшим развитием. В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают команды. От рабочей точки мышцы идут сигналы обратной связи в сенсорный центр (3). В центральной нервной системе происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления (рис. 1). Рис. 1. Принципиальное различие концепций построения движений на основе рефлекторной дуги и рефлекторного кольца. Объяснения в тексте В этой схеме рефлекторная дуга выглядит как один из ее частных случаев, когда совершаются движения, не нуждающиеся в коррекции, т. е. движения рефлекторной природы. Позднее Бернштейн детализировал схему рефлекторного кольца. В схеме присутствуют следующие элементы: моторные «выходы» (эффектор), сенсорные «входы» (рецептор), рабочая точка или объект (если речь идет о предметной деятельности), блок перешифровки, программа, регулятор, задающий прибор, прибор сличения. С наличием большего количества элементов рефлекторное кольцо функционирует следующим образом, В программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы ( SW — «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи ( IW — «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор (моторный «выход»)(рис. 2). Рис. 2. Схема рефлекторного кольца по Н. А. Бернштейну. Объяснения в тексте Рассматривая данную схему, необходимо обратить внимание на одну интересную деталь. Рецептор не всегда посылает сигналы на прибор сличения. Бывают случаи, когда сигнал поступает сразу на задающий прибор. Это бывает в тех случаях, когда экономичнее перестроить движение, чем его корректировать. Это особенно важно в экстренных ситуациях. В условиях спарринга чаще всего так и происходит, я видел видео на которой спортсмен бьёт ногой ломает ногу (конкретно ломает), но тем не менее с рецепторов сигналы не поступают, он пытается на нее встать и разумеется падает. Помимо рефлекторного кольца Бернштейн выдвинул идею об уровневом построении движений. В ходе своих исследований он обнаружил, что в зависимости от того, какую информацию несут сигналы обратной связи — сообщают ли они о степени напряжения мышц, об относительном положении частей тела, о предметном результате движения и т. д., — сигналы приходят в разные чувствительные центры головного мозга и соответственно переключаются на моторные пути на разных уровнях. Причем под уровнем следует понимать буквально «слои» в центральной нервной системе, Так были выделены уровни спинного и продолговатого мозга, уровень подкорковых центров, уровень коры. Каждый уровень имеет специфические, свойственные только ему моторные проявления, каждому уровню соответствует свой класс движений. Уровень А — самый низкий и филогенетически самый древний. У человека он не имеет самостоятельного значения, но отвечает за важнейший аспект любого движения — тонус мышц. На этот уровень поступают сигналы от мышечных проприорецепторов, которые сообщают о степени напряжения мышц, а также информация от органов равновесия. Самостоятельно этот уровень регулирует весьма немногочисленные движения. В основном они связаны с вибрацией и тремором. Например, стук зубов от холода. Уровень В — уровень синергий. На этом уровне перерабатываются сигналы в основном от мышечно-суставных рецепторов, которые сообщают о взаимном положении и движении частей тела. Таким образом, этот уровень замкнут па пространство тела. Уровень В принимает большое участие в организации движений более высоких уровней, и там он берет на себя задачу внутренней координации сложных двигательных ансамблей. К собственным движениям этого уровня относятся потягивания, мимика и т. д. Уровень С. Этот уровень Бернштейн назвал уровнем пространственною поля. На данный уровень поступают сигналы от зрения, слуха, осязания, т. е. вся информация о внешнем пространстве. Поэтому на данном уровне строятся движения, приспособленные к пространственным свойствам объектов — к их форме, положению, длине, весу и пр. К движениям данного уровня относятся все переместительные движения. Отработка Кихона (базовых движений) начинается всегда с работы на воздухе, без партнера. Уровень D — уровень предметных действий. Это уровень коры головного мозга, отвечающий за организацию действий с предметами. К этому уровню относятся все орудийные действия и манипуляции с предметами. Движения на этом уровне представлены как действия. В них не фиксирован двигательный состав, или набор движений, а задан лишь конкретный результат. На этом уровни идет работа с партнером, если движение хорошо отработано на воздухе, то при работе с партнером не будут возникать проблем с тем куда и как двигаться, Движения вроде отработаны, но партнер вносит свои коррективы. На этом этапе необходимо концентрироваться предмет, на партнера, на то, где должен оказаться партнер, какой должен быть результат движения, а не то как делается само движение. Уровень Е — наивысший уровень — уровень интеллектуальных двигательных актов. К этому уровню относятся: речевые движения, движения письма, движения символической или кодированной речи. Движения этого уровня определяются не предметным, а отвлеченным, вербальным смыслом. На этом уровни движений (техники), уже нет концентрации на предмете, на Уке, техника выполняется как бы сама, не задумываясь о партнере, подстройка под его движения происходит автоматически. Рассматривая построение уровней движения, Бернштейн делает несколько очень важных выводов. Во-первых, в организации движений участвуют, как правило, сразу несколько уровней — тот, на котором строится движение и все нижележащие уровни. Так, например, письмо — это сложное движение в котором участвуют все пять уровней. Уровень А обеспечивает тонус мышц. Уровень В придает движениям плавную округлость и обеспечивает скоропись. Уровень С обеспечивает воспроизведение геометрической формы букв, ровное расположение строк на бумаге. Уровень D обеспечивает правильное владение ручкой. Уровень Е определяет смысловую сторону письма. Исходя из этого положения, Бернштейн делает вывод о том, что в сознании человека представлены только те компоненты движения, которые строятся на ведущем уровне, а работа нижележащих уровней, как правило, не осознается. То есть когда техника переходит на уровень D (В Айкидо наверное это уровень 1-3 дана), уже нет концентрации на самом движение, есть концентрация на предмете, где у него слабая сторона, куда и как лучше разбалансировать и т.д. И это не означает, что когда человек (ученик) находится на предыдущем уровни отработки движения ему не нужно концентрироваться на самом движении, не нужно думать о нем. То над чем не задумываются на уровни 1-3 дана, именно над этим и нужно думать на более ранних этапах отработки. Точно так же как Сиханы 7 и более данов говорят, что не важен противник, не важен какой партнер, он становится не важным только благодаря тому, что их движения перешли на уровень Е. Поэтому и нет концентрации над предметом. Вся демагогия о том, что нужно быть «Пустым», не нужно «думать» идет от того, что те кто преподают уже забыли что когда то над этим очень сильно задумывались, и, более того, им говорили их Сенесеи, что это не правильно думать, и со временем они освоили «правильную» техники, при выполнении которой теперь не задумываются, а реально просто перешли на следующий уровень отработки движения. Во-вторых, формально одно и то же движение может строиться на разных ведущих уровнях. Уровень построения движения определяется смыслом, или задачей, движения. Например, круговое движение, в зависимости от того, как и для чего оно выполняется (движение пальцев, движение тела или действие с предметом), может строиться на любом из пяти уровней. Данное положение чрезвычайно интересно для нас тем, что оно показывает решающее значение такой психологической категории, как задача, или цель, движения для организации и протекания физиологических процессов. Этот результат исследований Бернштейна может рассматриваться как крупный научный вклад в физиологию движений. Процесс формирования двигательного навыка и принцип активности. Разработка схемы рефлекторного кольца и уровневого построения движений позволили Бернштейну совершенно по-новому рассмотреть механизмы формирования навыка. Процесс формирования навыка был описан Бернштейном очень подробно. Рассматривая этот процесс, он выделяет большое количество частных фаз, которые объединяются в более крупные периоды. В первый период происходит первоначальное знакомство с движением и первоначальное овладение им. По мнению Бернштейна, все начинается с выявления двигательного состава движения, т. е. с того, как надо его делать, какие элементы движения, в какой последовательности, в каком сочетании надо выполнять. Ознакомление с двигательным составом действия происходит путем рассказа, показа или разъяснения, т. е. в этот период идет ознакомление с тем, как движение выглядит внешне, или снаружи. С этой фазы начинается отработка любого движения, любого приема. За этой фазой следует другая, наиболее трудоемкая фаза первого периода — фаза прояснения внутренней картины движения. Одновременно с этим человек учится перешифровыватъ афферентные сигналы в команды. Таким образом, следуя схеме рефлекторного кольца, наиболее «горячими» являются следующие блоки: «программа», где происходит прояснение внешнего двигательного состава; «задающий прибор», где формируется внутренняя картина движения; блок перешифровки, обеспечивающий отработку правильных коррекций. При отработке движения очень важно вначале «записать» программу, где какая нога, где какая рука и куда все это движется, блок перешифровки нужен в случае не правильных движений для их корректировки, но он будет работать только если в «задающем приборе» сформировано картина движения. Блок перешифровки особо важен, поскольку состоит из первоначального распределения коррекций по нижележащим уровням, т. е. построение движения опирается не на одно рефлекторное кольцо, а па целую цепь колец, которая формируется в процессе отработки правильных коррекций. Как мы уже отмечали, первоначально освоение движения происходит под контролем сознания, т. е. все процессы, составляющие рефлекторное кольцо высшего уровня, находятся в поле сознания. Однако в ходе многократного повторения начинают проясняться и осваиваться сигналы обратной связи на нижележащих уровнях. Как правило, они дают более точные и недоступные более высокому уровню сведения о различных сторонах движения. Например, на уровне А имеется информация о тонусе мышц и равновесии тела, на уровне В — о положении частей тела и т. д. Таким образом, кольцу ведущего уровня принадлежит общая программа движения, а все остальные блоки дублируются в кольце нижнего уровня. В частности, у каждого кольца свой «рецептор», поскольку получаемая информация об аспектах движения различна и соответствует своему уровню, а эффектор (блок, на который сходятся сигналы управления с различных уровней) у колец общий (рис. 3). рис. 3. Схема соподчинения колец ведущего и фонового уровней Изложенный выше процесс подводит нас ко второму периоду — автоматизации движений. В течение этого периода происходит полная передача отдельных компонентов движения или всего движения целиком в ведение фоновых уровней. В результате ведущий уровень частично или полностью освобождается от заботы об этом движении. В этот же период происходит еще два важных процесса: во-первых, увязка деятельности всех низовых уровней, в процессе которой происходит отладка сложных иерархических систем многих колец, во-вторых, «рекрутирование» готовых двигательных блоков. Содержание второго процесса заключается в том, что низовые уровни организма, имеющие опыт построения движений, уже имеют готовые двигательные блоки (функциональные системы), которые были сформированы ранее по другим поводам. Именно в этом смысл базы, и пошаговой отработке приемов, отрабатываются блоки (функциональные системы), затем из этих блоков (базовых движений), формируется та или иная техника. Поэтому если при освоении нового движения организм установит необходимость в определенного типа перешифровках (уже имеющихся у него), то он иногда в буквальном смысле ищет и находит их в своем «словаре». Бернштейн назвал этот словарь «фонотекой». Причем «фоно» понималось в значении не звука, а именно фона, на котором разворачиваются двигательные процессы. Он считал, что каждый организм имеет свою «фонотеку», т. е. набор фонов, от объема которого зависят его двигательные возможности и даже способности, и как следствие чем больше эта «фонотека», тем сложнее движения. (рис3). Интересен тот факт, что необходимый блок может быть извлечен из движения, совершенно не похожего на осваиваемое. Например, при обучении езде на двухколесном велосипеде очень полезен бег на коньках, потому что в обоих типах движения имеются одинаковые внутренние элементы. В последний, третий, период происходит окончательная шлифовка навыка за счет стабилизации и стандартизации. Под стабилизацией понимается достижение такого уровня исполнения движения, при котором оно приобретает высокую прочность и помехоустойчивость, т. е. не разрушается ни при каких обстоятельствах. В данном случае под помехоустойчивостью следует понимать «сопротивление партнера», то есть при любых действиях Уке, в «фонотеке» уже записано и отработано на должном уровни такое количество движений, которое на автомате (не задумываясь над выбором) позволяет выбрать верное в данный момент движение. В свою очередь, под стандартизацией понимается приобретение навыков стереотипности. В этот период при многократном повторении движения получается серия абсолютно одинаковых копий, напоминающих, по выражению Бернштейна, «гвардейцев в строю». Эти абсолютно одинаковые движения хорошо видны у Андо Сенсея, он работает как часы, четко, равномерно, одинаково. Следует отметить, что стереотипность помимо автоматизации обеспечивается механизмом использования реактивных и инерционных сил. Когда движение осуществляется в быстром темпе, возникают реактивные и инерционные силы. Их влияние может быть двояким: они могут мешать движению или, если организм научится эффективно их использовать, способствовать движению. Именно в этом я вижу смысл фразы «слияние с партнером» которую часто повторяют Сенсеи. Механическая сила и устойчивость достигается и за счет нахождения динамически устойчивой траектории. С изложенной выше теорией движения тесно связана разработанная Бернштейном концепция принципа активности. Суть принципа активности состоит в постулировании определяющей роли внутренней программы в актах жизнедеятельности организма. Принцип активности противопоставляется принципу реактивности, согласно которому тот или иной акт — движение, действие — определяется внешним стимулом. В конкретно-физиологическом плане принцип активности неразрывно связан с открытием принципа рефлекторного кольцевого управления движением. Необходимым условием функционирования рефлекторного кольца является наличие центральной программы. Без центральной программы и управляющего устройства рефлекторное кольцо не будет функционировать, движение будет осуществляться по рефлекторной дуге, но по рефлекторной дуге целесообразное и целенаправленное движение совершаться не может. Если предположить, что центральная программа представлена в организме в виде механизма реализации активности, то необходимо сделать вывод: принцип активности в конкретно-физиологическом выражении и признание механизма кольцевого управления движением — это прочно связанные между собой теоретические постулаты. Таким образом, напрашивается следующий закономерный вывод: движение человека есть результат проявления его активности. Однако если не соглашаться со вторым выводом, то можно задать вопрос: неужели природа всех движений активна и реактивность в движении не проявляется? Конечно нет. Существует огромное количество движений или двигательных актов, имеющих реактивную природу, например мигание или чихание. В этих примерах движение вызвано определенным стимулом. Именно в этом и заключается бесконтактная техника Айкидо (и другой бесконтакт), движения отрабатываются раз за разом, причем Уке приучается выполнять страховку вне зависимости от того было воздействие или нет, со временем внешняя форма движения определенного Сенсея является определенным стимулом для выполнения той или иной страховки. Для совмещения активного и реактивного движения человека Бернштейн предлагает разместить все имеющиеся у животного и человека движения вдоль воображаемой оси. Тогда на одном полюсе окажутся безусловные рефлексы, например чихательный или мигательный, а также сформированные при жизни условные рефлексы, например выделение слюны у собаки на звонок. Эти движения действительно запускаются стимулом и определяются его содержанием. На другом же полюсе этой воображаемой оси окажутся движения и акты, для которых инициатива запуска и содержание, т. е. программа, задаются изнутри организма. Это так называемые произвольные акты. Между этими полюсами существует и промежуточное звено, которое составляют движения, включаемые внешним стимулом, но не так жестко, как рефлексы, связанные с ними по содержанию. Эти ответные на стимул движения имеют различные варианты проявления. Например, в ответ на удар вы отвечаете ударом или «подставляете другую щеку». В этих двигательных актах стимул приводит не к движению, а скорее к принятию решения, т. е. исполняет роль пускового механизма — инициирует движение. Таким образом, мы можем утверждать, что существуют как реактивные движения, так и активные. Однако, расположив все движения по воображаемой оси, мы не сказали о том, что это за ось. Эта ось может быть охарактеризована как ось активности. В этом случае безусловно рефлекторные реакции могут рассматриваться как акты с нулевой активностью, а произвольные двигательные акты - как активное движение. Между тем, если не согласиться и с этими доводами об активной природе движений, можно задать еще более тонкий вопрос. Когда функционирует рефлекторное кольцо, блок сличения принимает сигнал сразу двух уровней: от внешней среды и от программы. И эти два потока занимают как бы симметричное положение. Поэтому возникает такой вопрос: почему нужно отдавать предпочтение программным сигналам, а не сигналам внешней среды, которые действуют по реактивному принципу, но на практике оказывается, что эти сигналы несимметричны. Сигналы программы намного опережают сигналы из внешней среды. Так, при проведении эксперимента, суть которого заключалась в необходимости испытуемому читать текст с одновременной записью голоса и положения глаз, было установлено, что существует рассогласование между тем, какое слово произносит испытуемый, и на какое слово он смотрит. Взгляд испытуемого опережает произносимые слова. Следовательно, сигналы, исходящие из программы (активные) и поступающие из внешней среды (реактивные), функционально несимметричны в том смысле, что первые опережают вторые. Но несимметричность имеет еще один, более важный аспект. Как показал Бернштейн, активные сигналы обеспечивают существенные параметры движения, а реактивные — несущественные, технические детали движения. Существенный или не существенный параметр движения зависит от степени его отработки. Когда человек только учится читать у него глаза не бегут спереди того слова которое он читает, так же и технике, когда человек только учится выполнять движение, прием - сигналы активные, необходимо думать над каждым движением, со временем они превращаются в «технические детали» и сигналы становятся реактивными. Есть еще одно подтверждение приоритетной роли активности в формировании движения. Это подтверждение кроется в наших представлениях о стимуле. Мы привыкли к тому, что раз произошло воздействие стимула, то за ним должна следовать реакция. Но на человека постоянно воздействует очень большое количество стимулов, а двигательная реакция проявляется только в отношении лишь некоторых из них. Почему? Потому что субъект сам выбирает соответствующие стимулы. Например, нам надо написать письмо, и мы берем в руки попавшую в поле зрения ручку, но мы берем ее в руки не потому, что она попалась нам на глаза, а потому, что нам надо написать письмо. Именно этим и обуславливается выбор той или иной технике при одинаковых атаках. В качестве заключения хотелось отметить, что фактически Бернштейн просто научно подтвердил то, что Японские сенсеи и так знали, достаточно отработать 10 000 раз движение и оно будет получаться, Бернштейн просто объяснил за счет чего оно будет получаться и как будет эволюционировать понимание движение и само движение. | |
| Просмотров: 6001 | Комментарии: 1 | Рейтинг: 0.0/0 |
 .
.  .
. .
. .
.| Всего комментариев: 1 | ||
| ||
| Мои статьи [9] |